从零开始的 PX4-ROS 之旅
PX4-ROS-LEARNING
参考链接
这里是 PX4 官方文档的资料
从零开始的 PX4-ROS 之旅
因为 PX4 的 SDK 会随着版本变化而更新,实际上我们在开发的时候应该不是直接使用 SDK,而是参考 SDK 做好的 MAVROS 通信接口来进行 ROS 软件包的开发,所以重点关注的就是如何使用 MAVROS 来控制 PX4 了
下面是是 ROS 无人机项目的大概框图,当我们在使用一个 ROS 无人机项目时,最好能大概知道项目的各个节点中有话题和服务在传递,各个节点是怎么协作的,这样我们就可以更好地理解整个项目的结构,然后在后续进行魔改
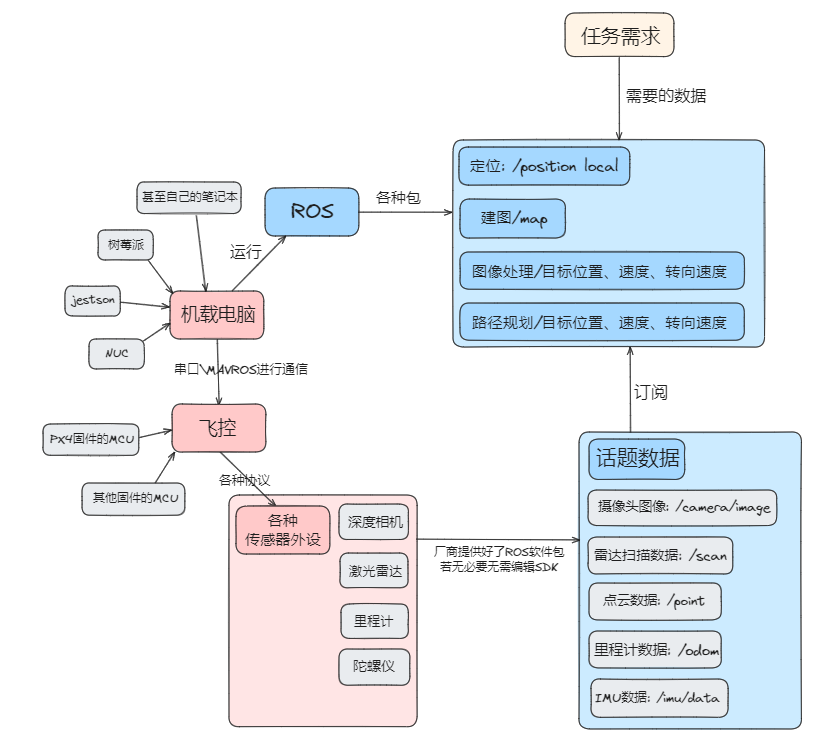
这需要我们重点关注运行项目时,项目提供的 launch 文件,这些文件里面包含了各个节点甚至是各个模块的启动顺序,可以是我们了解一个项目的入口
然后在运行项目时,我们可以通过善用 ROS 终端工具来查看项目的节点之间的关系、发布的话题消息、服务有哪些(对于终端工具有个印象即可,不必记 api,但是要想起来要理清项目结构需要获取那些信息,然后去查对应的命令)
编写 PX4-ROS 软件包的注意事项
进行 ROS-PX4 仿真的启动顺序
1 | cd <PX4-Autopilot_clone> |
P.S
大家可以都去申请 github 学生包,可以用 VScode 在工作区或者文件内内联使用 o1-preview 但是这个需要进行身份信息的补完
- 2 FA
- authorization 令牌
- 学信网学生证明(deepl 翻译成英文)
- 学校邮箱
- 邮政编码
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 circLΣMoon's blog!
评论